
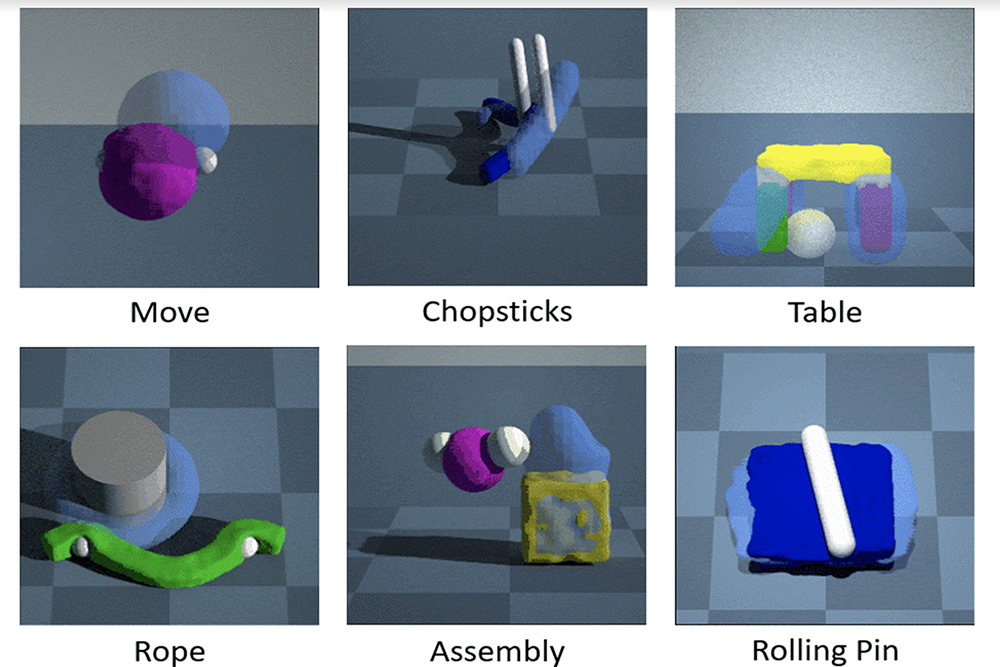
Robots can solve a Rubik’s cube and navigate the rugged terrain of Mars, but they struggle with simple tasks like rolling out a piece of dough or handling a pair of chopsticks. Even with mountains of data, clear instructions, and extensive training, they have a difficult time with tasks easily picked up by a child. A new simulation environment, PlasticineLab, is designed to make robot learning more intuitive. By building knowledge of the physical world into the simulator, the researchers hope to make it easier to train robots to manipulate real-world…


