
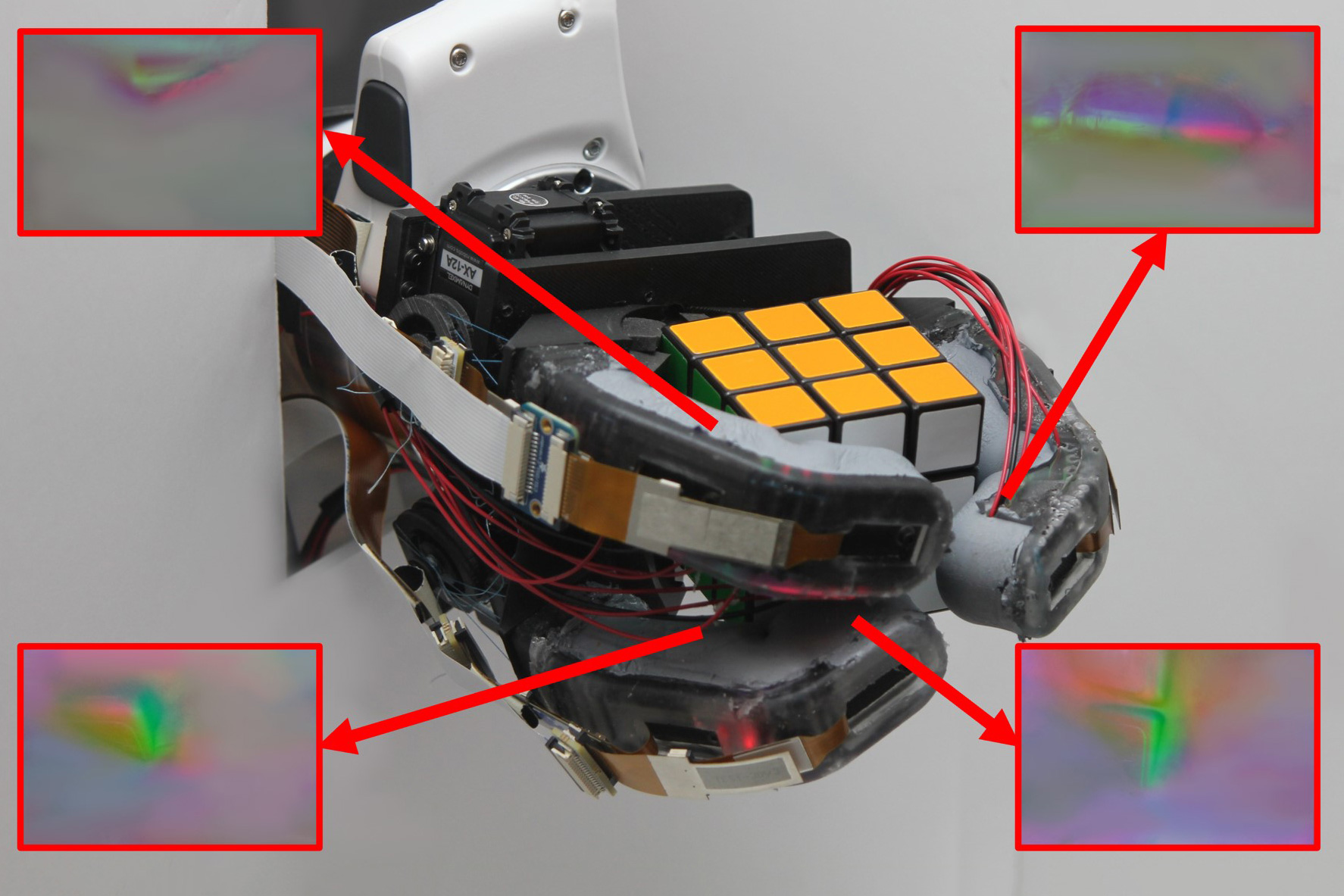
Inspired by the human finger, MIT researchers have developed a robotic hand that uses high-resolution touch sensing to accurately identify an object after grasping it just one time. Many robotic hands pack all their powerful sensors into the fingertips, so an object must be in full contact with those fingertips to be identified, which can take multiple grasps. Other designs use lower-resolution sensors spread along the entire finger, but these don’t capture as much detail, so multiple regrasps are often required. Instead, the MIT team built a robotic finger with…


